Proyecto: Robot Desmalezador (PUE 2016)
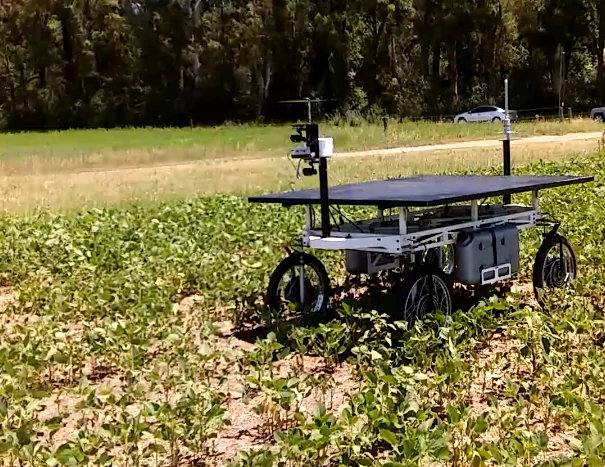
El robot desmalezador del CIFASIS fue pensado para ser autónomo, eficiente, capaz de navegar por un campo sembrado, recorriendo los surcos ó siguiendo determinada trayectoria y mientras lo hace, detectar las malezas actuando sobre ellas (aplicar herbicida, arrancarlas, quemarlas, etc).
Características
- El prototipo tiene un diseño liviano, por lo que no compacta el suelo a su paso.
- Tiene 4 ruedas con motores independientes que le permiten desplazarse por el campo.
- Posee paneles solares y baterías que alimentan los motores de las ruedas y la computadora de abordo, por lo que no necesita combustible fósil para funcionar.
- Para poder localizarse usa sensores de posición, orientación y movimiento (GPS, brújula, acelerómetro, giróscopo).
- Tiene 2 cámaras sincronizadas que permiten ver en profundidad; están orientadas hacia adelante permitiendo ver el horizonte y el campo sembrado (dos metros desde el robot). Las cámaras sirven para evitar pisar el cultivo mientras el robot navega, a la vez que detecta a través de algoritmos de inteligencia artificial posibles malezas en el área de cultivo observada.
- Puede ser operado de tres maneras, una es con un control remoto, otra es comandada por una persona a través de un dispositivo remoto (PC, tablet, celular), y de manera autónoma una vez establecida un lote del campo a recorrer.
- La versión actual cuenta con 9 aspersores sobre un eje en la parte trasera y un sistema hidráulico para aplicar herbicida de forma localizada.
El objetivo del Proyecto del #CIFASIS es utilizar el prototipo y el problema de desmalezado automático en sí para ampliar las capacidades de nuestra institución en el desarrollo de software para robótica (navegación, control, detección y seguimiento de malezas). También propone la formación de capital humano en el área, crear nuevas interacciones entre los distintos grupos que participan del proyecto, y de éstos con posibles empresas receptoras de la tecnología incorporada. El proyecto fue completamente financiado por Conicet en el marco del llamado a Proyectos de Unidad Ejecutora (PUE) 2016. Participan activamente del proyecto 7 grupos del Centro.
Proyectos asociados
- CONICET (PUE 0015-2016 y PIBAA Nº 0042), AGENCIA I+D+i (PICT 2021-570), Universidad Nacional de Rosario (PCCT-UNR 80020220600072UR) y Gobierno de la Provincia de Santa Fe (PEICID-2021-170).
Dataset públicos
The Rosario Dataset. https://robot.cifasis-conicet.gov.ar/
Videos
Imágenes del proyecto